

List of Sources:
Table of Contents:
- Momentum and Impulse (Young et al., 2020)
- Conservation of Momentum (Young et al., 2020)
- Momentum Conservation and Collisions (Young et al., 2020)
- Elastic Collisions (Young et al., 2020)
- Center of Mass (Young et al., 2020)
- Rocket Propulsion (Young et al., 2020)
Momentum and Impulse (Young et al., 2020)
Newton’s Law In Terms Of Momentum
Consider a particle with constant mass m. Newton’s second law of motion can then be written as;
…..(1)
Note: Since the given mass m is constant, it can be moved inside the derivative.
Thus, the net force acting on the particle is equal to the rate of change of, product of mass (m) and velocity vector , with respect to time.
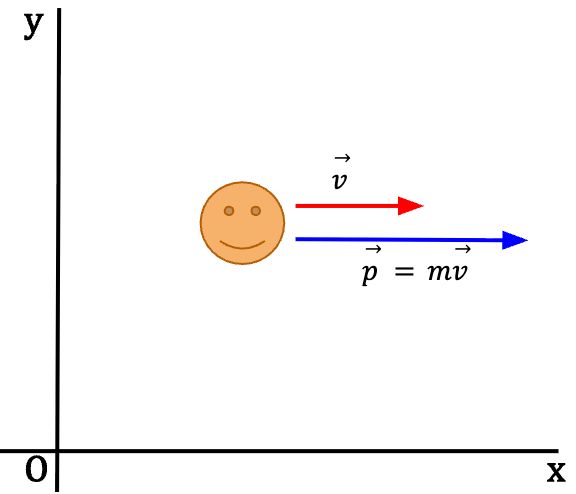
The quantity in the parenthesis in equation (1) can then be defined as momentum or linear momentum of the particle;
…..(2)
The magnitude of momentum is directly proportional to the particle’s mass and speed. Larger is the mass and speed of the particle, larger is it’s momentum.
Momentum is a vector quantity. It has the same direction as the particle’s velocity. It’s SI unit is kg m/s and it’s plural form is momenta.
The momentum of a particle can be broken down into it’s components in the x, y and z directions;
px = mvx…..(3)
py = mvy…..(4)
pz = mvz…..(5)
where vx, vy and vz are the components of particle’s velocity.
Substituting equation (2) into equation (1), we get;
…..(6)
Equation (6) says that the net external force acting on a particle it equal to the rate of change of it’s momentum with respect to time. This relationship between external forces acting on a body and it’s momentum is only applicable in inertial frames of reference since it’s derived from Newton’s laws of motion. The physical meaning of this equation is that a very large net external force corresponds to a rapid change in the particle’s momentum whereas a small net force corresponds to a gradual rate of change in particle’s momentum.
The Impulse-Momentum Theorem
Both momentum and kinetic energy depend on the particle’s mass and velocity so wherein lies the difference? Theoretically, momentum is a vector quantity whereas kinetic energy is scalar. Magnitude of momentum (p) is directly proportional to the speed (v) of the particle but the magnitude of kinetic energy (K) varies with the square of the speed (v2). In order to understand the physical difference between the two quantities, we need to define another quantity known as impulse.
Consider a particle that is under the influence of a constant net external force, . If the net force acts over a time period given by , then the impulse ( ) of the net external force is equal to the product of the net external force and the time period;
…..(7)
Impulse is a vector quantity and it acts in the same direction as the net external force. The SI unit of impulse is N s or kg m/s, which is the same as the momentum.
Now, going back to equation (6), if the net external force, acting on a particle is constant, then the quantity is also constant and thus, can be written as;
…..(8)
Equation (8) says that, as a consequence of constant net force, the instantaneous rate of change of momentum with respect to time is equal to the total change of momentum over the time interval divided by .
Multiplying both sides of equation (8) with , we get;
…..(9)
Equating equations (7) and (9), we see that;
…..(10)
The Impulse-Momentum Theorem states that the impulse of the net external force, acting on a particle over the time interval is equal to the change in momentum of the particle during this interval.
If the force is not constant, equation (8) can integrated over the time interval ;
Comparing equation (11) to equation (10), we see that;
Even when net external force is not constant, equation (12) can be written as;
…..(13)
where is the average net external force acting on the body.
Note: If is constant, is simply equal to and equation (13) becomes equivalent to equation (7).
To understand why the integral in equation (12) can be replaced with average net external force () acting on a body, see Figure 2.
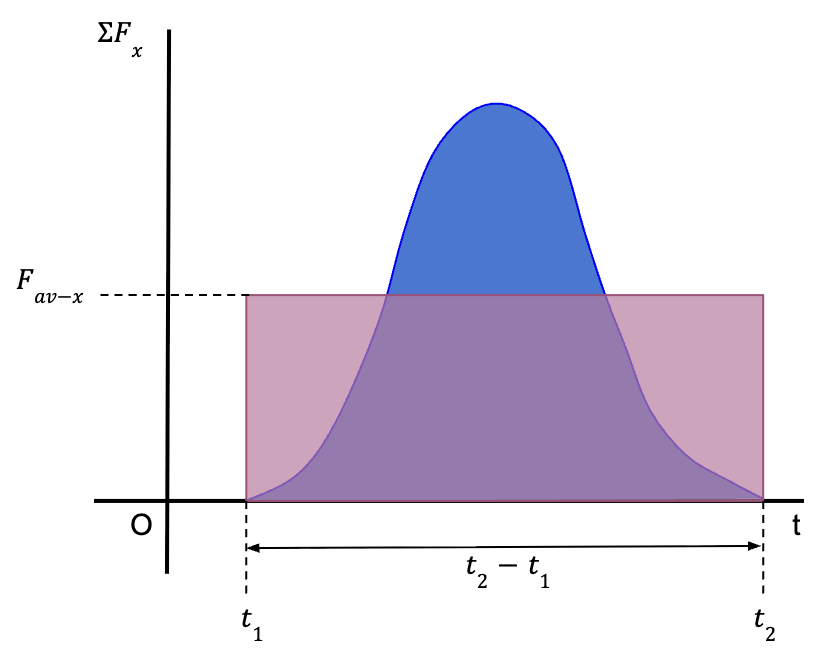
In Figure 2, the blue curve represents a variable force that is changing with time. Since the force is not constant, the impulse (area under the curve) is given by;
The pink rectangle corresponds to the average net external force acting in the x-direction, and thus the impulse (area under the curve) is given as;
The area under the blue curve and the area of the pink rectangle are roughly equal and thus, impulse can be simply calculated by replacing the time varying force, with the average net external force, .
Aside: Since both impulse and momentum are vector quantities, they can be broken down into their component form;
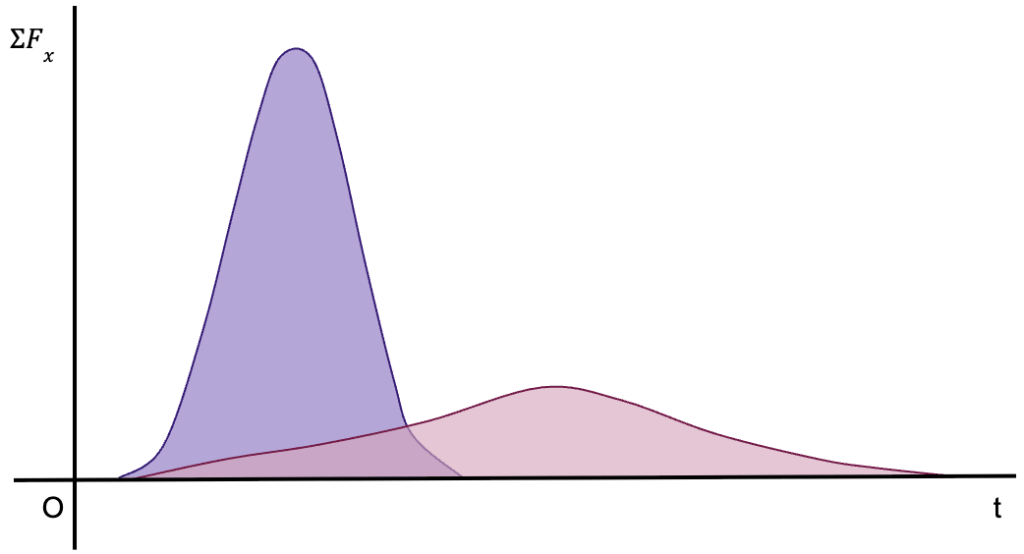
Also, note that a small force acting over a long time period produces an equivalent impulse to when a large force acts for a short duration (See Figure 3). In other words, the two forces of different magnitude will yield a similar effect on the particle.
A real-world application of impulse-momentum theorem would be airbags in a car. Initially, the driver has a momentum of where is the velocity of the car and hence the driver. After the collision, as the car instantaneously comes to rest, driver’s momentum drops to zero, = 0.
According to impulse-momentum theorem;
This means that no matter how the driver comes to rest, the impulse will remain the same.
However, instead of instantaneously coming to rest by hitting the steering wheel, airbags increase the time over which the driver comes to rest.
Since impulse is equal to;
Increasing the time interval reduces the amount of average force exerted on the driver and therefore, increases the chances of survival.
Momentum and Kinetic Energy Compared
According to the impulse-momentum theorem (, changes in the momentum of a particle are caused by impulse, which depends on the time over which the net external force acts.
On the other hand, work-energy theorem ( tells us that changes in the kinetic energy are caused by work done on the particle, which depends on the distance over which the net external force acts.
Let’s say there is a particle at rest during time t = t1. Since the particle’s initial velocity, , it’s momentum at t1 is zero; , and it’s kinetic energy at t1 is also zero; .
Let a constant net external force, act on this particle such that at time t = t2, it has a velocity . During the time period , the particle travels a distance s.
Now according to the impulse-momentum theorem, the momentum of the particle at time t2 is given by;
But = 0,
This means that momentum of a particle at any instant is equal to the impulse ( needed to accelerate the said particle from rest to it’s speed at that instant.
On the other hand, the work-energy theorem gives the kinetic energy of the particle at time t = t2;
Since K1 = 0;
Thus, kinetic energy of the particle is equal to the work done on the particle that accelerates it from rest.
Impulse is the product of force needed to accelerate the particle and the time period over which this acceleration occurs;
whereas, work done on the particle is equal to the product of the force needed to accelerate the particle and the distance over which this acceleration occurs.
A practical application of this concept would be catching either a 0.20 kg ball moving with a speed of 10 m/s or a 0.10 kg ball moving with a speed of 20 m/s.
| Momentum (mv) | Kinetic Energy (1/2mv2) | |
| Ball 1 | (0.20kg)x(10m/s) = 2 kgm/s | (1/2)(0.20kg)(10m/s)2= 10J |
| Ball 2 | (0.10kg)x(20m/s) = 2kgm/s | (1/2)(0.10kg)(20m/s)2= 20J |
The two balls have the same momentum, which means that the same amount of impulse in needed to bring them both to rest.
Since in both cases and = 0, impulse,.
However, the second ball has twice the amount of kinetic energy when compared to the first ball, which means that to catch the second ball, you need to do twice the amount of work to bring the ball to rest.
For ball 1, K1 = 10 J and K2=0; Wtot = K2 – K1 = -10 J
For ball 2, K1 = 20 J and K2=0; Wtot = K2 – K1 = -20 J
Thus, for a given amount of force that you exert on each ball to catch it, it will take you the same amount of time to stop the two balls, but the second ball will cause your hands to be pushed back twice as much with the ball covering twice as much the distance when compared to the first ball and hence, twice the amount of work will be done.
Conservation of Momentum (Young et al., 2020)
In a system with two or more objects that are interacting, the concept of momentum is very useful. To understand this, consider the following:
Types of Forces
- Internal Forces: The forces that particles in a system exert on each other are called internal forces.
- External Forces: The forces that are exerted on the system by some outside source are called external forces.
An isolated system is when there are no external forces acting on a system and the only forces present are internal to the system.
Now, consider an isolated system consisting of two particles A and B, such that they both exert a force on each other.
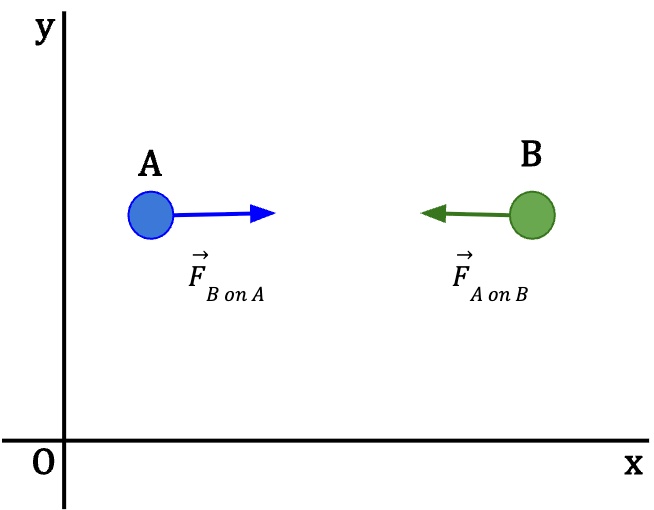
Now, according to Newton’s third law, the forces that A and B exert on each other are equal in magnitude and opposite in direction. This means that the impulses of the forces exerted on each other and the changes in their momenta are also equal in magnitude and opposite in direction.
For particle A with net external force, , we can then say;
Similarly, for particle B;
Applying Newton’s third law;
Alternatively;
Substituting equations (26) and (27) into equation (29), we get;
Since the rate of change of momentum with respect to time for particles A and B is equal and opposite, the rate of change of their sum with respect to time is zero.
We can now call , the total momentum of the system;
Substituting equation (31) into equation (30), we get;
Thus, even though the individual momentum of the two particles is changing, the total momentum is constant, or in other words, the total momentum of an isolated system is conserved.
If external forces are present,
where
In general, when external forces are present, the total momentum is not constant.
However, consider two blocks sitting on a surface;
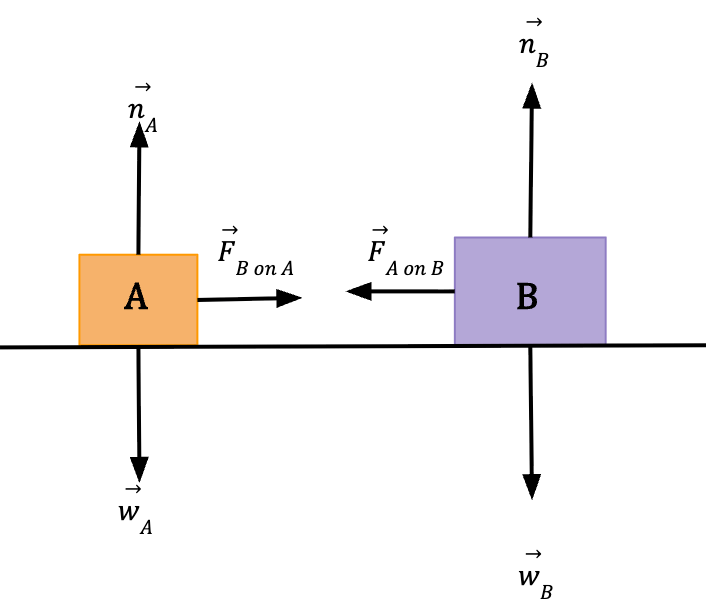
This system is not isolated since there are external forces (normal force and weight) exerting on the two blocks.
Equation (31) then becomes;
For block A;
For block B;
But, and ;
So then, equations (34) and (35) reduce to equations (26) and (27), which means that once again, the total momentum of the system is constant. This means that even when external forces are present, the total momentum of the system is conserved provided that the net external forces equal zero.
Thus, the law of conservation of momentum states that, “The total momentum of the system is conserved when the vector sum of all the external forces acting on a system is equal to zero“.
The law of conservation of momentum is useful because it can be applied to a system without having much knowledge about the nature of the internal forces acting between the particles of a system. Since Newton’s laws were used to derive the principle of conservation of momentum, it is applicable only in inertial frames of reference.
The law of conservation of momentum can be generalized for a system of n number of particles with the total momentum given by;
Since momentum is a vector quantity, can be easily calculated using it’s component form;
Similarly,
If the net external force acting on a system is zero, then px, py and pz are all constant2.
Momentum Conservation and Collisions (Young et al., 2020)
In physics, when objects interact strongly with one another over a short period of time, it is referred to as a collision. Some examples of collisions include: billiard balls striking each other on a pool table, car accidents, neutrons bombarding with atomic nuclei in a nuclear reactor etc.
For most collisions, the forces acting between the interacting objects are much larger than external forces acting on them and therefore, the colliding objects can be treated as an isolated system. This would mean that the total momentum before and after the collision will be conserved.
Elastic and Inelastic Collisions
When the forces acting between the colliding objects are conservative, the total mechanical energy of the system is conserved and the kinetic energy of the system before and after the collision is the same. Such an interaction between two objects is called an elastic collision.
For example, collision between two billiard balls can be considered almost completely elastic.
Consider two gliders A and B moving on a frictionless air table, such that each glider is mounted with an ideal spring bumper.
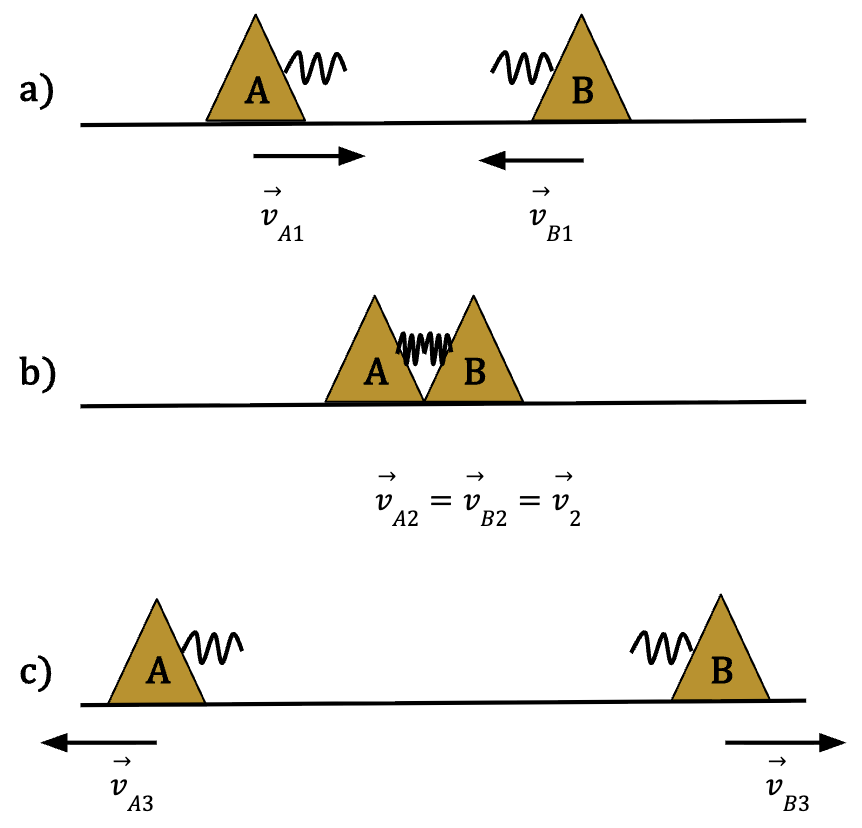
In figure 6, since the spring’s obey Hooke’s Law, they exert conservative force, F = -kx, on each other. This means that the total mechanical energy of the system remains the same before, during and after the collision;
Note 1: are all zero in equation (41).
Note 2: When the springs are maximally compressed, the gliders are at rest with respect to each other, or in other words, they move with the same velocity ( in figure 6) with respect to the ground. The system comprising of the two gliders cannot come to a stop with respect to the ground because momentum needs to be conserved at all times.
Since the total mechanical energy of the system remains conserved, we can say that the collision between the two gliders A and B is elastic.
When the total kinetic energy is lost after a collision, such that the total mechanical energy is not conserved, the interaction is called an inelastic collision. A fired bullet that gets drilled into a block of wood is an example of an inelastic collision. This is because the friction of the wood that brings the bullet to rest is a non-conservative force that causes the system to lose kinetic energy after the collision. In figure 6, if the frictionless air table is replaced with a rough surface with coefficient of kinetic friction given by , the collision would then be inelastic.
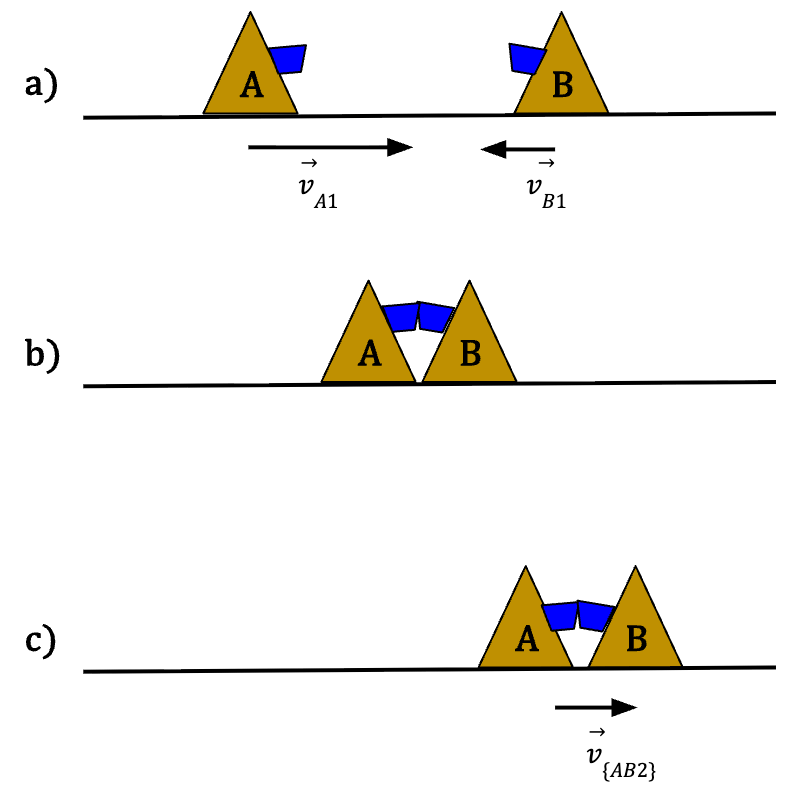
If during an inelastic collision, the objects stick together and start to move together as one, such an interaction between the objects is referred to as a completely inelastic collision. In figure 6, if the spring bumpers were to be replaced with velcro strips, such that the two gliders stick together after the collision and start to move as one object, the collision would then be completely inelastic (see Figure 7).
Note: It is also possible for an object to have a final kinetic energy that is greater than it’s initial value, as is the case for rifle recoil.
Rules to Remember for Collisions
- If the net external force acting on the system is zero, the total momentum of the system before and after the collision is same3.
- If a collision is elastic, the total kinetic energy of the system before and after the collision is same.
Completely Inelastic Collisions
Consider the gliders A and B as shown in figure 7. Since the two gliders stick together in a completely inelastic collision, they both travel with the same velocity post-collision;
Applying law of conservation of momentum;
Equation (43) can be used to determine the common velocity after the collision for gliders A and B.
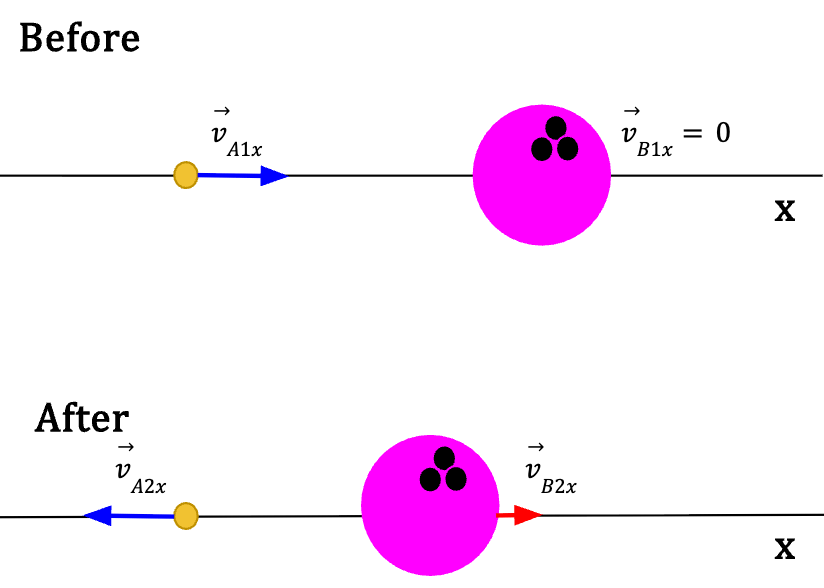
As an example, if an object A that is travelling with x-component of velocity given by , collides inelastically with an object B which is at rest, equation (43) reduces to;
If we compare the total kinetic energy before and after the collision;
Taking ratio;
Since and it can be confirmed that the kinetic energy post collision is less than the total initial kinetic energy of the system, as is the case in an inelastic collision.
Elastic Collisions (Young et al., 2020)
The forces between two colliding objects during an elastic collision are conservative. When two billiard balls strike, each ball deforms by a very small amount resulting in momentary conversion of some kinetic energy into elastic potential energy, which is then converted back to kinetic energy after the collision without any losses to the total mechanical energy of the system.
Consider two objects A and B undergoing an elastic collision in one dimensional space, say the x-direction.
Since the kinetic energy of the system before and after the collision is the same, we get;
And the conservation of momentum gives;
If the masses ( and initial velocities of the two objects ( are known, equations (48) and (49) can be used to determine the final velocities of object A and B (.
Elastic Collisions, One Object is at Rest
If object B is initially at rest, then equation (48) reduces to;
And equation (49) becomes;
Rearranging equations (48);
Using the identity, ,
Similarly, rearranging equation (49);
Dividing equation (53) by equation (55), we get;
Now substituting in equation (53) with the result from equation (56), we get;
Opening the brackets and rearranging equation (58);
Substituting the value of from equation (62) into equation (56);
Equations (62) and (63) give a general result to calculate the final velocities of two objects A and B undergoing an elastic collision, given that the object B is initially at rest.
Let’s look at special cases:
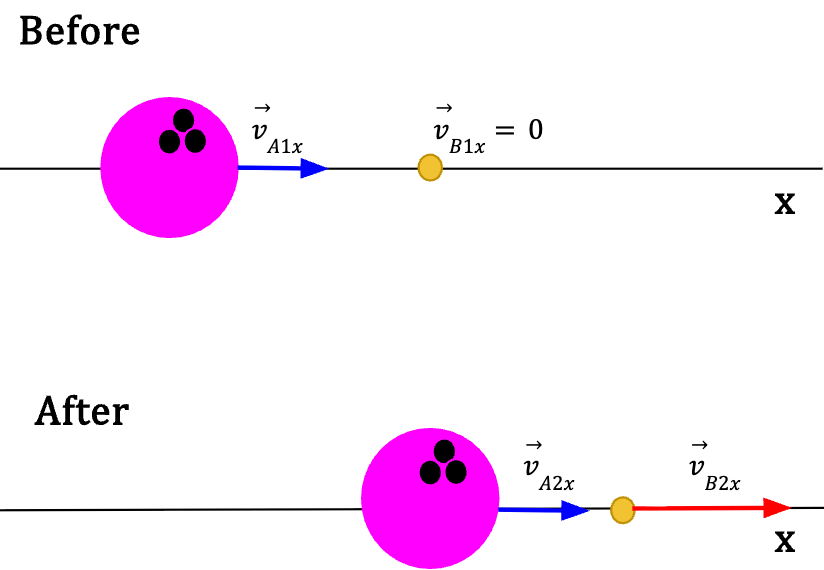
Case 1: When ,
Then and equation (62) becomes;
Since ,
Equation (63) reduces to;
An example would be if a bowling ball moving with velocity were to collide with a stationary ping-pong ball. The bowling ball would keep moving with approximately the same velocity as if the collision never occurred. However, the ping-pong ball will move with a speed that is twice that of the bowling ball and in the same direction as the bowling ball (see Figure 8).
You might think that if the bowling ball is moving with approximately the same velocity as before, where is the ping pong ball getting the kinetic energy from that is causing it to move with twice the speed?
You need to remember that is only approximately equal to . The ping pong has so little mass compared to the bowling ball that it requires very little kinetic energy to gain twice the speed of the bowling ball.
Average mass of a bowling ball = 6 kg
Average mass of a ping pong ball = 0.0027 kg
Let’s say the bowling ball is initially moving with a speed of 6.7 m/s (.
Then the speed attained by the ping pong ball after the collision, .
Clearly, the kinetic energy of the ping pong ball is insignificant compared to the kinetic energy of the bowling ball, even though the ping pong ball has twice the speed of the bowling ball.
Case 2: When ,
Then and equation (62) becomes;
Since ,
Equation (63) reduces to;
As shown earlier,
Now if the ping pong ball is moving towards the bowling ball with initial velocity such that the bowling ball is at rest, then the ping pong ball will strike the bowling ball and reverse its direction without much change to it’s magnitude of the velocity vector. On the other hand, the bowling ball will move in the same direction as but it’s magnitude of velocity will be much smaller compared to the ping pong ball (see Figure 9).
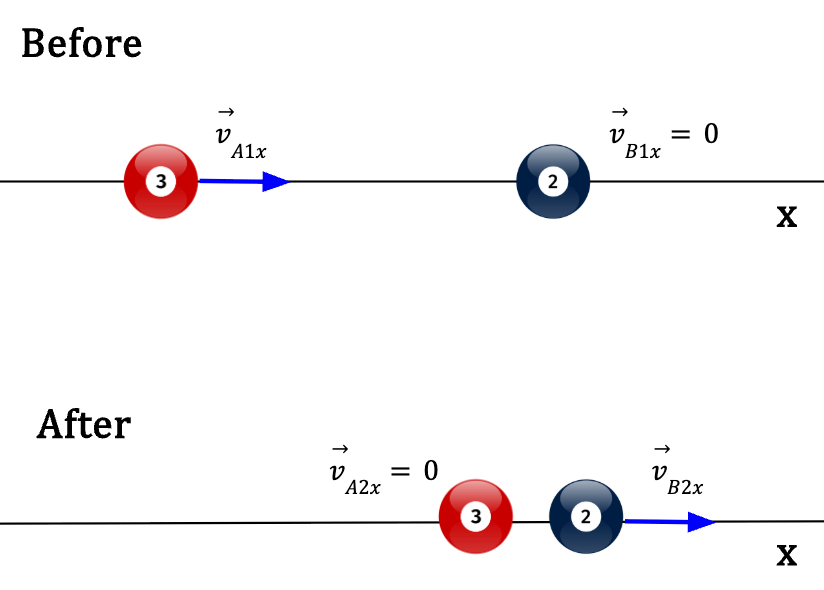
Case 3: When ,
Plugging this condition into equations (62) and (63), we get;
In case of two billiard balls on a pool table, when one ball moving with velocity strikes another ball that is initially at rest, the moving ball loses all of it’s momentum and kinetic energy, and passes it on to the stationary ball. Therefore, in the case when balls have equal mass, the first ball comes to a rest after the elastic collision while the second ball starts moving with the same velocity as the initial velocity of the first ball (see figure 10).
Elastic Collisions and Relative Velocity
For two objects A and B that undergo an elastic collision, equation (56) can be written as;
Now, is the relative velocity of B with respect to A after the collision, which according to equation (73) is equal to .
Before the collision,
is the relative velocity of B with respect to A.
Since , we can say that the relative velocity of B with respect to A after the collision is equal to the negative of the relative velocity of B with respect to A before the collision.
Thus, the relative velocity before and after the collision has same magnitude but opposite direction. The direction of relative velocity before and after the collision is opposite to one another because before the collision, A and B are moving towards each other but after the collision, A and B start to drift apart.
Let’s say we were to observe the same collision from a different coordinate system that is moving with constant velocity relative to the first (stationary) coordinate system, then the velocities of A and B will be different (B will no longer have zero initial velocity with respect to the moving coordinate system), but their relative velocities will have the same magnitude and direction.
We can therefore, deduce a general statement for the relative velocities of A and B undergoing an elastic collision in one-dimensional space (regardless of whether one object is at rest or not):
For two objects undergoing an elastic collision in straight line motion, their relative velocities before and after collision have same magnitude but opposite direction.
A similar relationship between relative velocities also exists in 3-D space,
The relative velocities of two objects undergoing an elastic collision have the same magnitude in three dimensional space before and after the collision.
If the above condition is met, we can say that the kinetic energy of the system before and after the collision will be conserved.
Center of Mass (Young et al., 2020)
A helpful way of using the principle of conservation of momentum is by describing it in terms of center of mass.
Consider a system of n particles with masses given as such that the location of is given by coordinates , location of is given by coordinates and so on.
The center of mass of the system, is then defined as;
In vector form, the center of mass, can be written as;
Thus, center of mass is a “mass-weighted average position of the particles”.
Center of Mass of Solids
In order to determine the center of mass of solids that have a continuous distribution of particles, the sum in equation (75) and (76) needs to be switched to an integral. Solving these integrals can often get quite complex.
However, there are three general statements that can be made regarding the center of mass of solids:
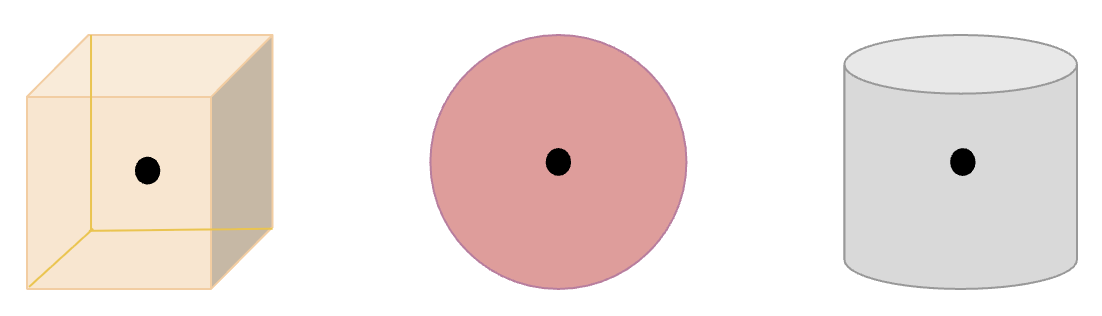
- In case of homogeneous objects4 such as a sugar cube, a billiard ball or a can of fruit juice, the center of mass lies at the same location as the geometric center. For the homogeneous cube, sphere and cylinder shown below, the black dot corresponds to the geometric center which is also the center of mass of the object.
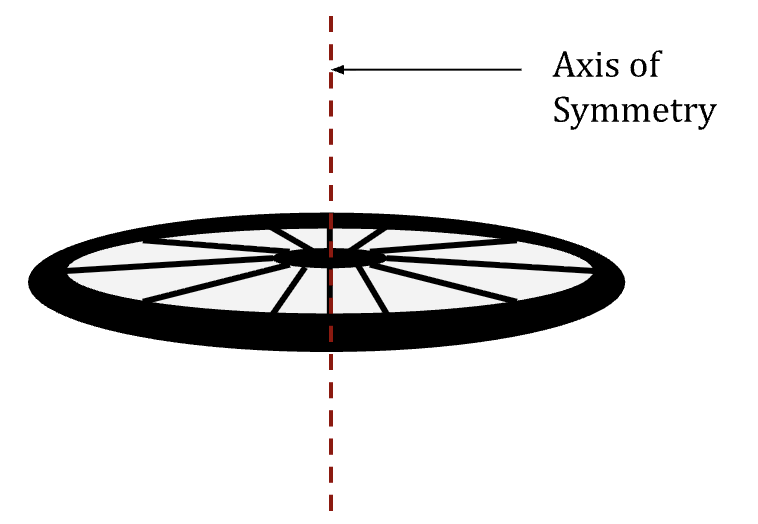
- If an object has an axis of symmetry5, the center of mass will always be located along this axis, as is the case for a wheel shown below:
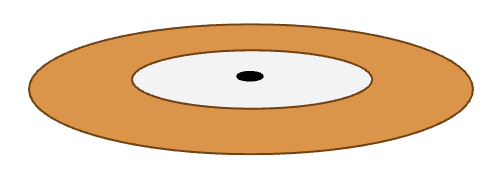
- Center of mass (black dot) does not have to lie inside the object, as is the case for a donut shown below:
Motion of the Center of Mass
The significance of center of mass can be understood by examining what happens to it when the particles in the system are moving.
If we take the time derivative of equations (75) and (76), we get the x and y components of the velocity vector of the center of mass.
The x-component of the velocity vector can be calculated as follows;
Now , , ,…….;
Similarly, the y-component of the velocity vector is given by;
The vector equation for the velocity of the center of mass is then given by;
Let be the total mass of the system, then equation (81) can be written as;
The sum of the momenta of each particle, equals the total momentum of the system, .
We can now see that the total momentum of the system simply equals the product of total mass (M) and velocity of the center of mass ();
When a cricket batsman strikes the ball with his bat, he is striking a collection of particles that make up the ball. The impulse delivered to the ball causes each of these particles of mass to move with a momentum given by The total momentum of the system, …..is the same as if the batsman were to hit a single particle of mass that moves with a velocity after the strike.
Thus, the concept of center of mass justifies the practice of treating a macroscopic object as a point particle.
The principle of conservation of momentum states that if the net external forces acting on a system equal zero, then the total momentum of the system is conserved, or in other words, is constant.
Since , we can say that if the net external forces equal zero, the velocity of the center of mass is also constant.
External Forces and Center-of-Mass Motion
When the net external forces acting on a system do not equal zero, the total momentum of the system is no longer constant. This means that the velocity of the center of mass is also not constant.
If we take the time derivative of equation (81), we get the acceleration of the center of mass;
If total mass of the system, ;
According to Newton’s second law, is the vector sum of all the forces on particle 1, is the vector sum of all the forces on particle 2 and so on. This means that the vector sum of all the forces acting on all the particles in the system equals ;
Breaking the net external force acting on all particles, into it’s external () and internal () components;
Combining equations (85) and (87), we see that;
In accordance with Newton’s third law, the internal forces exist in pairs for a system of n particles. For example one such pair between particle 1 and 2 is given by;
Since the two forces in a pair are equal in magnitude but opposite in direction, the sum of all the internal forces () equals zero;
Thus, equation (90) reveals that when external forces act on a group of particles in a system, the center of mass moves in such a manner as if all of the mass was condensed at the location of the center of mass and it was being acted on by a net external force that equals the vector sum of all the external forces acting on the particles6.
~o~
An example of motion of center of mass:
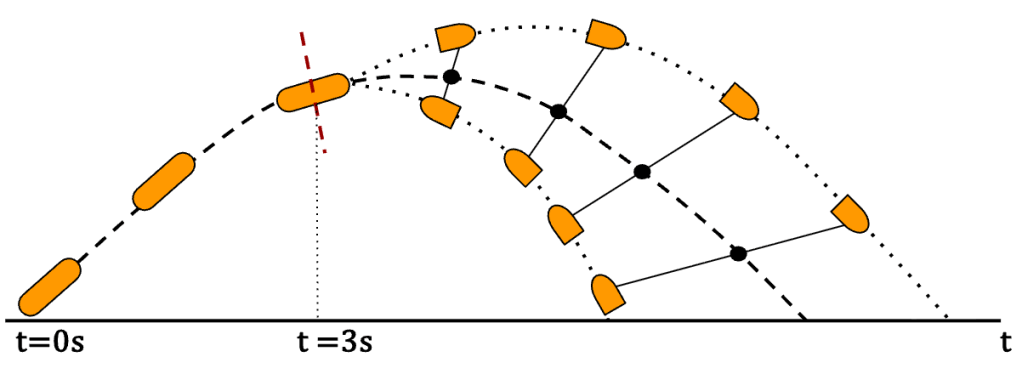
Consider a cannon shell travelling only under the influence of gravity such that air resistance is negligible. Since gravity is the only force acting on the cannon shell, it will travel in a parabolic trajectory. Now let’s say the shell breaks off mid-flight into two pieces of equal mass. After the shell breaks, the pieces fly off and continue to travel in their own parabolic trajectories. However, the center of mass of the two pieces still travels along the original path as though the total mass of the system was still concentrated at the point of the center of mass (see figure 11).
What happens when one piece of the cannon shell hits the ground?
As long as the fragments were in the air, the center of mass acted like a free-falling object and followed a parabolic trajectory. According to equation (90);
When one fragment of the cannon shell hits the ground, normal force acts on it. As soon as the normal force enters the equation, the net external force acting on the system changes;
Thus, the acceleration of the center of mass is no longer equal to and the center of mass will deviate from it’s parabolic trajectory.
~o~
A practical application of motion of center of mass is seen in astrophysics.
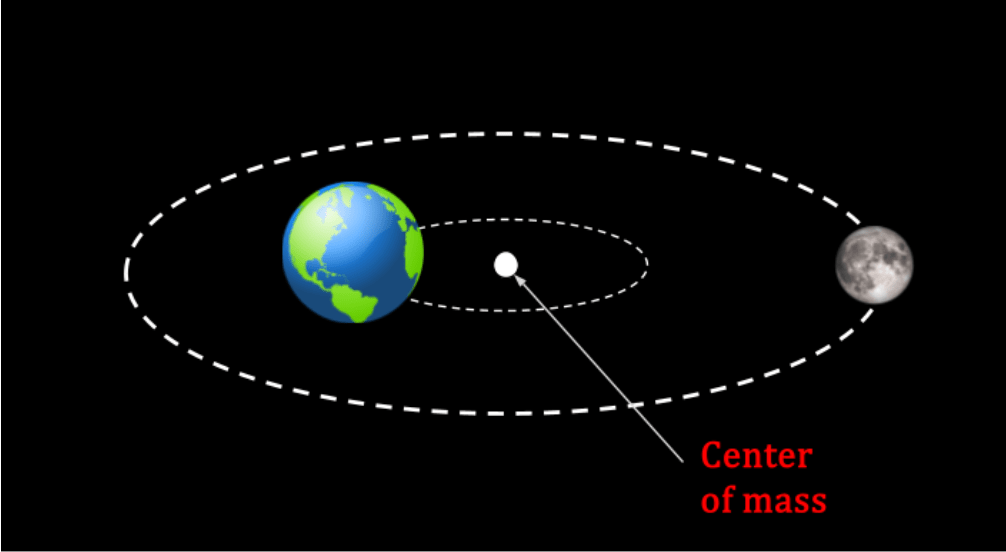
Consider the motion of earth and moon as a system. It is incorrect to say that the moon orbits around the earth. In reality, both the earth and the moon orbit their common center of mass (see figure 12).
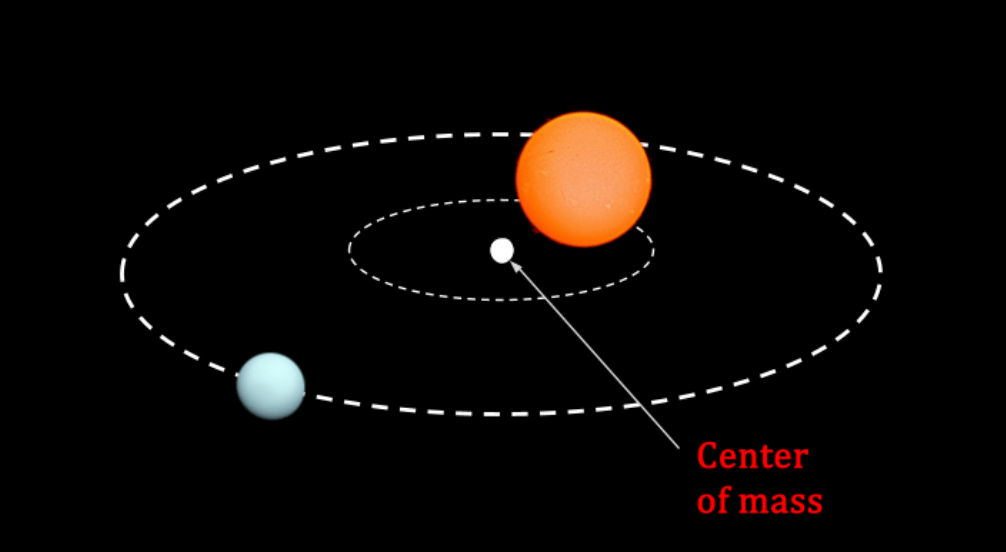
This technique has been used to identify planets orbiting distant stars. When the planets are so faint that they cannot be detected with a telescope, the motion of the star is carefully studied. If the star seems to be wobbling around a point, it is due to the presence of a planet/planets (see figure 13).
~o~
The motion of a system of particles can also be described in the following fashion by rewriting equation (85) as follows:
Since mass M is constant, it can be moved inside the derivative;
From equation (83), we see that just equals the total momentum of the system ();
Substituting equation (95) into equation (90), we get;
Note: Equation (96) looks similar to equation (6) with the difference being that equation (96) is applicable for when dealing with a system of particles such as a macroscopic object whereas equation (4) is to be used for when there is only a single particle.
Equation (96) tells us that the total momentum of the system can only be changed by external forces. If there are any internal forces present, they can change the individual momenta of the particles but have no effect on the total momentum of the system. Lastly, if the net external force acting on the system is zero, then according to equation (96), the total momentum of the system () is constant and according to equation (95), the acceleration of the center of mass () is zero or in other words, the velocity of the center of mass () is constant.
Rocket Propulsion (Young et al., 2020)
When mass of an object varies with time, the concept of momentum proves useful. Newton’s second law () is not applicable in this case because mass (m) is not constant.
When fuel is expelled, it is done so by exerting a force on it in the backwards direction. Now according to Newton’s third law, the fuel exerts an equal and opposite force on the rocket that propels it in the forward direction. When the fuel is ejected at such large quantities, the mass of the rocket decreases with time. However, the mass of the system (rocket plus fuel) remains constant.
Consider a rocket of initial mass, m in outer space such that no external forces act on it (force of gravity and air resistance are absent). Let x-axis be along the direction in which the rocket is moving.
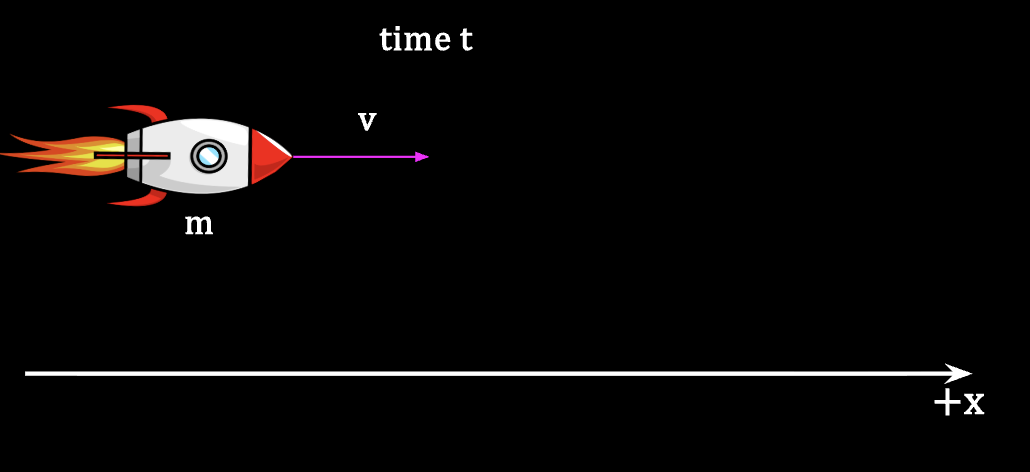
As can be seen in figure 14, at time t, the rocket is moving along the positive x-direction with velocity v (relative to our coordinate system) and has mass m. Thus, the x-component of it’s momentum at time t is given by;
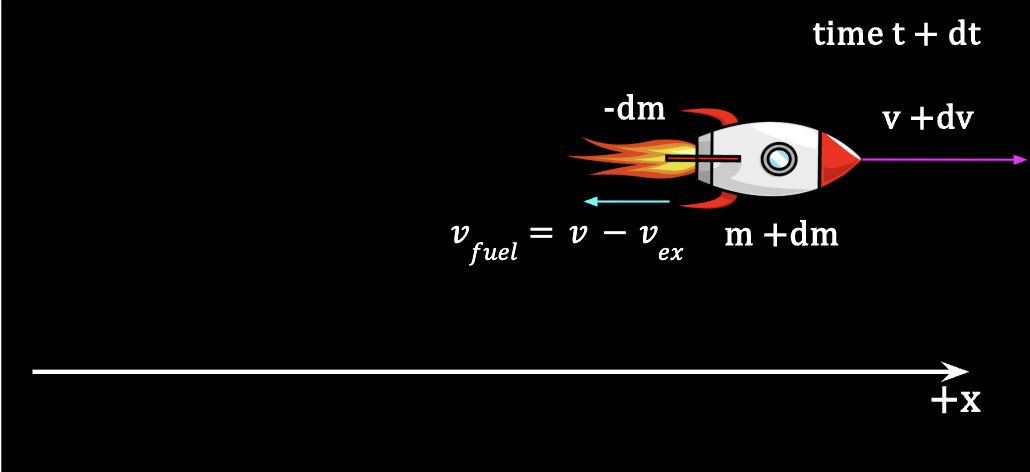
In an infinitesimal interval dt, the rocket burns fuel of mass dm and gains a speed of dv. (Note: dm is inherently a negative quantity which makes sense because as the rocket loses fuel, m+dm < m).
During this interval, the burned fuel of mass -dm is ejected from the rocket. (Note: Since dm is inherently negative, -dm is then a positive quantity). Let the speed at which the burned fuel is ejected7 relative to the rocket be vex. This means that the magnitude of the velocity of the burned fuel relative to the rocket is vex. Since the burned fuel is ejected in a direction opposite to the motion of the rocket, the velocity of the burned fuel relative to the rocket is given by -vex.
Now relative to our coordinate system, the x-component of velocity of the burned fuel, vfuel is given by;
To see how the above expression was derived, review the relative velocity discussion here;
Let’s denote our coordinate system by the letter C, the rocket by the letter R and fuel by the letter F, then the relative velocity of fuel with respect to our coordinate system is given as;
As discussed above, and ,
or
which is in agreement with equation (98).
And consequently, the x-component of the momentum of the ejected fuel is equal to;
Now at time t+dt, the momentum of the rocket is given by (see figure 14);
Thus, the total momentum of the system (rocket + ejected fuel) is given by;
Since, we assumed that there are no external forces acting on the system (rocket +fuel), then according to the law of conservation of momentum;
Opening the brackets;
Cancelling terms and rearranging;
Since dm and dv are infinitesimal changes in the mass and velocity of the rocket, their product dmdv is an even smaller quantity and can be neglected;
Dividing both sides by dt;
Now dv/dt equals the acceleration of the rocket;
The left side of the equation (111) simply equals the net external force acting on the rocket alone (remember net external force on the rocket and fuel as a system is zero). This net external force on the rocket is referred to as thrust and we can denote it by the letter F;
F is a positive quantity because -dm/dt is positive (as discussed before, dm is inherently negative because the rocket loses mass with time). A positive net external force makes sense because the rocket accelerates in the positive x-direction. Thrust is directly proportional to the exhaust speed, which means that faster is the fuel ejected relative to the rocket, larger is the force exerted on the rocket by the burned fuel. Additionally, thrust is also directly proportional to the rate of change of rocket mass with respect to time. This makes sense because as more fuel it burnt per unit of time, larger is the force on the rocket. Thus, an effective rocket burns fuel rapidly and ejects it at a high relative speed.
Using equation (111), the x-component of acceleration is given by;
Again, the acceleration of the rocket, a is positive because both exhaust speed and -dm/dt are positive. Now if both and dm/dt are constant, the acceleration keeps increasing until the rocket runs out of fuel.
~o~
A common misunderstanding
It is common to think that a rocket has to push off the ground to ascend. If that were the case, rockets could not use fuel to accelerate in outer space because there is nothing to push against. However, this is not the case because a rocket is able to lift off by utilizing the law of conservation of momentum. This is why rocket propulsion is even more effective in outer space because there is likely no gravity or definitely no air resistance.
~o~
Now, if the exhaust speed, is constant, then equation (113) can be integrated with respect to time in order to find an expression for the velocity of the rocket at any given time;
Changing the integration variables from v to v’ and m to m’ in equation (114) so that we can use v and m as upper limits of integration;
Let the rocket have an initial mass of m0 and an initial velocity of v0. Integrating equation (115);
Since the exhaust speed is constant;
Using the logarithmic identity: ln(a) – ln(b) = ln(a/b);
For the rocket to gain speed that is larger than the exhaust speed, vex, the term;
The graph of ln(x) is shown below:
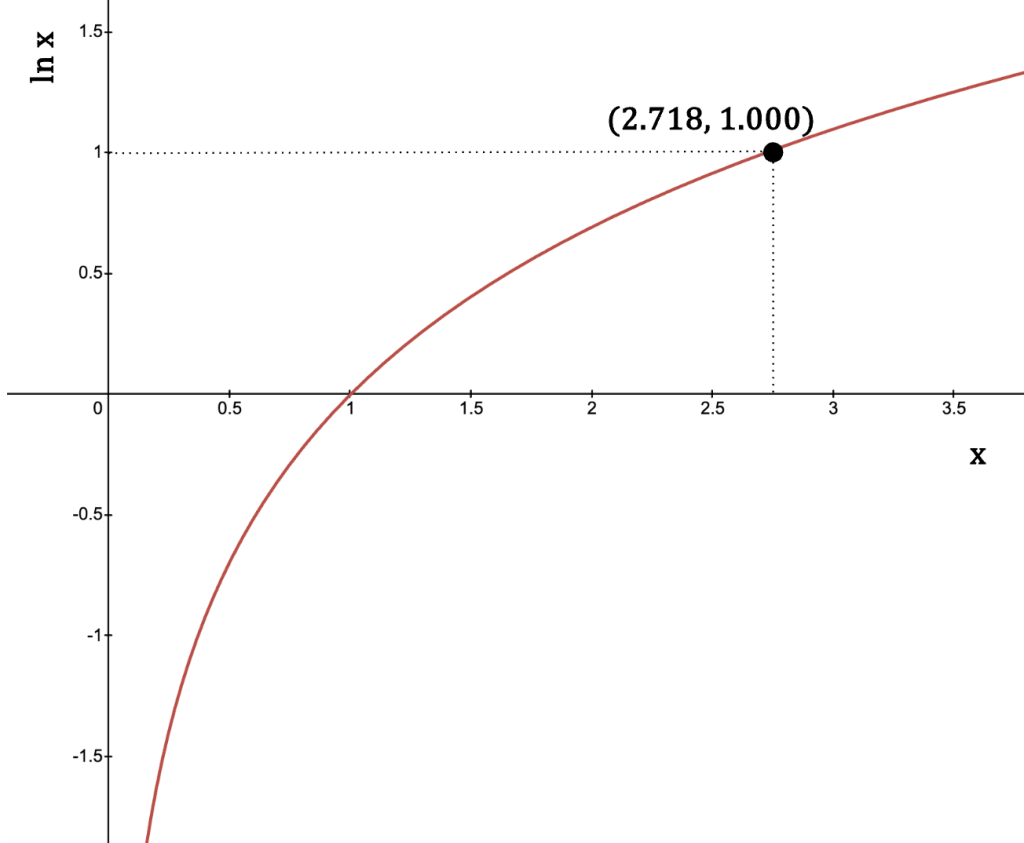
Clearly, for ln(m0/m) to be greater than 1, m0/m needs to be greater than 2.72 which equals the constant e (Euler’s number).
To maximize the speed attained by the rocket, m0/m needs to be as large as possible. This is done by making the initial mass of the rocket almost all fuel resulting in m0>>>m (m is the mass of the rocket after fuel has been burnt).
- Young, H.D. et al. (2020) Sears and Zemansky’s university physics: With modern physics. 15th edn. Boston: Pearson. ↩︎
- Law of conservation of momentum is even applicable in cases where the internal forces are not conservative, contrary to the law of conservation of mechanical energy. ↩︎
- Momentum conservation can even be used when external forces are present because oftentimes the internal forces between the colliding objects are much larger than the external forces acting on them. ↩︎
- Objects made of particles that have uniform composition and same physical properties. ↩︎
- An axis of symmetry is an imaginary line, a rotation around which would not affect the appearance of the object. ↩︎
- This result is the reason why in mechanics, we can safely treat a macroscopic object as a point particle. Additionally, it also explains why the motion of a macroscopic object can only be affected by external forces (internal forces cancel each other out). This is the reason why you cannot lift yourself up by pulling on your belt, the belt will exert a force that is equal and opposite to the force applied by your hands. ↩︎
- The speed at which a gas is ejected is referred to as the exhaust speed. ↩︎
